
Tematyka pomiaru parametrów ruchu drogowego jest obecna w pracach badawczych prowadzonych w Katedrze Metrologii i Elektroniki już od kilkunastu lat. W tym czasie zostało zrealizowanych siedem projektów badawczych finansowanych przez MNiSzW, w tym jeden projekt rozwojowy. Zaprojektowano i skonstruowano kilkadziesiąt systemów pomiarowych o różnym stopniu złożoności, współpracujących z różną liczbą i różnymi typami czujników pomiarowych i mierzących różne parametry. Efektem prowadzonych badań są również rozprawa habilitacyjna, dwie rozprawy doktorskie, 15 prac magisterskich, ponad 40 publikacji naukowych w tym wiele o zasięgu międzynarodowym. Prace badawcze i konstrukcyjne w tym obszarze są kontynuowane.
Członkowie grupy
OPRACOWANE KONSTRUKCJE SYSTEMÓw pomiarowych
– prosty system pomiaru podstawowych parametrów
– przenośny system pomiaru podstawowych parametrów ruchu – TREND,
– system klasyfikacji pojazdów,
– preselekcyjny system WIM (Weigh-In-Motion),
– wieloczujnikowy system ważenia pojazdów w ruchu MS-WIM,
– modułowy system pomiaru parametrów ruchu drogowego Traffic-1.
projekty badawcze
1. “Algorytmy szybkich pomiarów i przetwarzania sygnałów z czujników ruchu drogowego dla celów identyfikacji parametrów pojazdów”, projekt badawczy KBN nr rej. 8 T10C 014 11, praca realizowana w latach 1996 – 1998.
2. “Analiza właściwości metrologicznych systemu z pojedynczym czujnikiem indukcyjnym zastosowanego do pomiaru parametrów ruchu”, projekt badawczy KBN (promotorski), nr rej. 8T10C002 13, praca realizowana w latach 1997 – 1998.
3 “Opracowanie metod i systemów pomiarowych dla identyfikacji parametrów pojazdów drogowych w ruchu”, projekt badawczy KBN, nr rej. 8 T10C 012 17, praca realizowana w latach 1999 – 2002.
4. „Dokładne wieloczujnikowe systemy ważenia pojazdów samochodowych w ruchu”, projekt badawczy KBN, nr rej. 4 T10C 026 25, praca realizowana w latach 2003 – 2006.
5. „System pomiarowy o zmiennej strukturze do pomiaru parametrów ruchu drogowego”, projekt rozwojowy MNiSzW, nr rej. R01 035 01, praca realizowana w latach 2006 – 2009.
6. „Metody pomiaru i analizy profili magnetycznych obiektów metalowych w celu ich detekcji, rozpoznania i klasyfikacji”, projekt MNiSzW realizowany w latach 2009 – 2012.
7. „Wysokorozdzielcze algorytmy i systemy ważenia pojazdów samochodowych w ruchu”, projekt MNiSzW realizowany w latach 2010 – 2013.
prace na stopień naukowy:
1. Stencel M.; „Analiza właściwości metrologicznych systemu z pojedynczym czujnikiem indukcyjnym zastosowanego do pomiaru parametrów ruchu”, rozprawa doktorska, 1998.
2. Sroka R.; „Metody fuzji danych w pomiarach parametrów ruchu drogowego — Data fusion methods in measurements of road traffic parameters”, rozprawa habilitacyjna, 2008.
3. Burnos P.; „Autokalibracja systemów ważących pojazdy samochodowe w ruchu oraz analiza i korekta wpływu temperatury na wynik ważenia”, rozprawa doktorska, 2009.
4. Marszałek Z.: „Analiza właściwości metrologicznych układów do detekcji osi pojazdów z wykorzystaniem czujników indukcyjnych pętlowych”, rozprawa doktorska, 2014.
przenośmy system pomiaru podstawowych parametrów ruchu - trend
Przenośny system monitoringu ruchu drogowego jest przeznaczony do pomiaru podstawowych parametrów ruchu, takich jak prędkość pojazdu oraz jego zastępcza długość elektryczna na dwóch pasach ruchu. Wyniki pomiaru są zapisywane w pamięci nieulotnej. Pojemność pamięci zapewnia zapamiętanie zmierzonych parametrów dla około 100 tyś. pojazdów (około 3 doby na ruchliwej drodze).
System wyposażony jest w wyświetlacz LCD oraz klawiaturę, które umożliwiają jego obsługę przez operatora (wybór lokalizacji, ustawienie zegara czasu rzeczywistego, transmisja danych z pamięci wewnętrznej do urządzenia zewnętrznego, kasowanie pamięci) oraz wybór trybu pracy (test/pomiar).
System zapewnia automatyczną kontrolę stanu czujnika (pętli indukcyjnej) i wykrywa jej uszkodzenie (zwarcie/przerwa). Urządzenie zasilane jest ze źródła napięcia stałego 12V (np. akumulator).
Parametry techniczne:
Architektura:
- dwa modułu kondycjonowania sygnałów analogowych z czujników indukcyjnych,
jednostka CPU z klawiaturą membranową i wyświetlaczem LCD.
Wejścia: - dwa wejścia na pętlowy czujnik indukcyjny na jeden pas ruchu. Stacja jest przystosowana do współpracy z czujnikami o wymiarach 2m (w poprzek pasa ruchu) x 1.5m (wzdłuż pasa), ułożonymi jeden za drugim wzdłuż pasa ruchu. Odległość pomiędzy osiami tych czujników wynosi 2m.
Wielkości mierzone: - prędkość do 200 km/h,
zastępcza długość elektryczna pojazdu do 25m.
Parametry rejestrowane: - data i godzina pomiaru (z rozdzielczością 0.1s),
kod lokalizacji punktu pomiarowego,
numer pasa ruchu (max. 2),
prędkość pojazdu (z rozdzielczością 1 km/h)
długość pojazdu (wyrażana w dm, z rozdzielczością 1 dm),
Interfejs: - RS232 – transmisja danych pomiarowych,
Pamięć: - FLASH 1MB,
pojemność pamięci: 100 tyś pojazdów.
Zasilanie: - zasilanie: 12V DC,
pobór mocy dla dwóch pasów ruchu: 15 W.
Kontakt: dr hab. inż Ryszard Sroka
system ważący pojazdy MS-WIM
Celem projektu było opracowanie i analiza właściwości metrologicznych systemu MS-WIM (Multi Sensor Weigh in Motion), który zainstalowany w pasie ruchu pozwoliłby na automatyczny pomiar parametrów pojazdów, a w szczególności nacisków osi oraz masy całkowitej, bez konieczności nakładania istotnych ograniczeń na ich prędkość lub tor jazdy. Cechą szczególną systemów będących przedmiotem projektu, istotnie odróżniającą je od systemów WIM konstruowanych i stosowanych obecnie zarówno na świecie jak również w Polsce, jest kilkukrotnie mniejsza niepewność wyników pomiarowych.
W ramach projektu osiągnięte zostały następujące cele:
- opracowano i zweryfikowano modele parametryczne opisujące zmienność nacisku poszczególnych osi pojazdu na jezdnię podczas jazdy, dla różnych klas pojazdów ciężarowych. Modele te zostały wykorzystane do optymalizacji liczby i sposobów rozmieszenia (wzdłuż toru jazdy) czujników nacisku, oceny niepewności wyników ważenia każdego pojazdu, analizy metod kalibracji systemu WIM;
- dokonano optymalnego wyboru liczby czujników i ich rozmieszczenia z uwzględnieniem kosztów stanowiska, założonej niepewności pomiaru, zakresu prędkości i asortymentu ważonych pojazdów oraz zbudowano pierwsze w Polsce terenowe stanowisko MS-WIM umożliwiające kontrolę masy pojazdów ciężarowych,
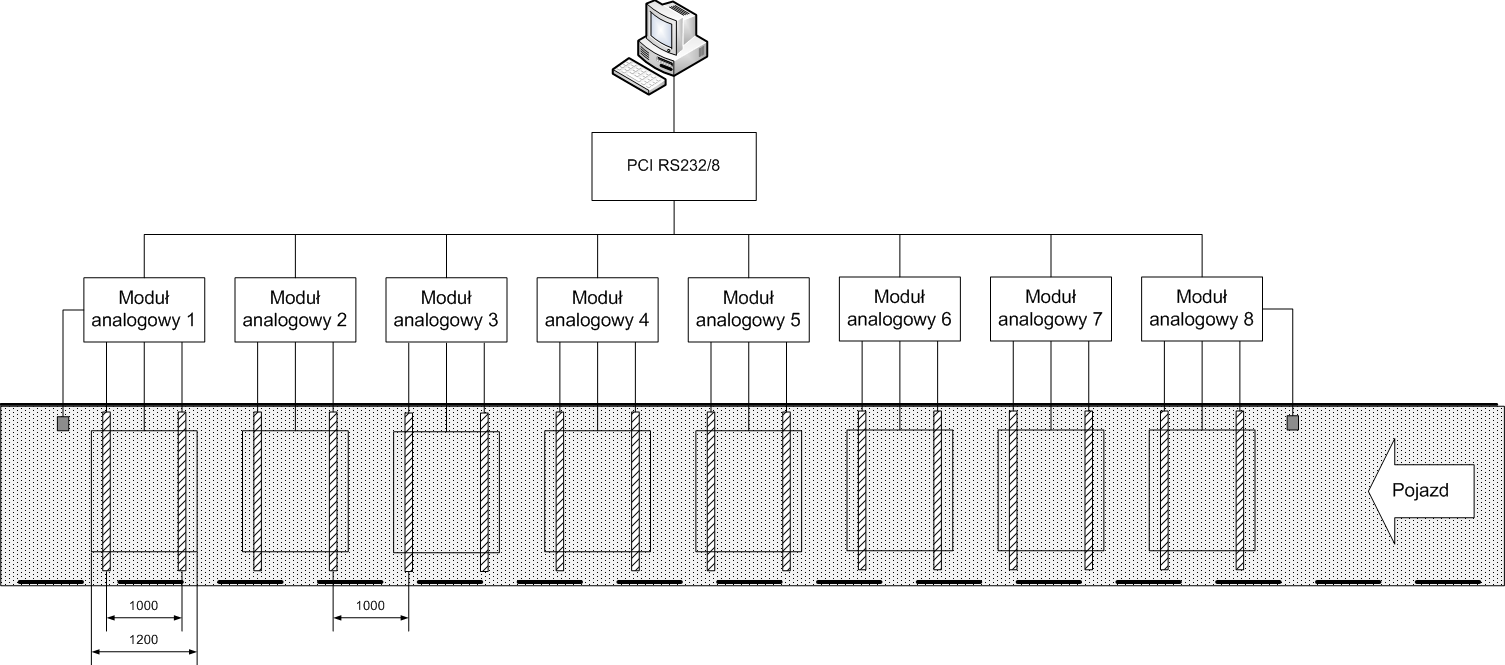
- opracowano system akwizycji i przetwarzania danych pomiarowych z uwzględnieniem dużej liczby czujników (kilkanaście czujników nacisku, kilka indukcyjnych czujników obecności, kilka czujników temperatury nawierzchni) oraz wymagań dotyczących szybkości obliczeń (do trzech pojazdów ważonych w ciągu jednej sekundy), pojemności pamięci (archiwizacja danych o parametrach ruchu dla celów statystycznych), transmisji danych do systemu nadrzędnego (dane dotyczące przekroczeń dopuszczalnego nacisku lub masy całkowitej),
- przeprowadzono analizę dokładności i stosowalności kilku algorytmów estymacji statycznych nacisków poszczególnych osi ważonego pojazdu oraz jego masy całkowitej. Opracowane algorytmy zaimplementowano w systemie pomiarowym,
- przeprowadzono analizę i opracowano algorytmy korekcji wpływu czynników zakłócających wynik ważenia (temperatura, zmiana prędkości, wahania pionowe i poprzeczne ważonego pojazdu) w zakresie ich zmienności występującym w miejscu lokalizacji systemu MS-WIM. Określono ilościowe wpływy czynników zakłócających,
- opracowano algorytm detekcji pojazdów przeciążonych z uwzględnieniem wyników ważenia, klasyfikacji, parametrów przejazdu przez stanowisko WIM, oszacowania niepewności ważenia każdego pojazdu (niepewność wyników ważenia oceniana na bieżąco dla każdego pojazdu na podstawie wyników pomiaru parametrów jego ruchu wg opracowanego algorytmu),
- przeprowadzono analizę różnych metod kalibracji systemów WIM i wpływu wybranego sposobu kalibracji na dokładność systemu ważenia pojazdów. W oparciu o uzyskane wyniki przeprowadzono kalibrację terenowego systemu MS-WIM,
- opracowano i zweryfikowano algorytmy fuzji danych pomiarowych z poszczególnych czujników WIM umożliwiające minimalizację zakłócającego wpływu składowej dynamicznej i wiarygodną estymację nacisku statycznego oraz masy pojazdu,
- opublikowano wyniki prac w kraju i za granicą (łącznie 24 prace).
Kontakt: dr hab. inż Ryszard Sroka


system ważący pojazdy MS-WIM
- Pojedyncza pętla indukcyjna,
- Układ dwóch pętli indukcyjnych,
- Układ dwóch pętli indukcyjnych oraz detektor osi,
- Układ dwóch pętli indukcyjnych oraz polimerowy czujnik nacisku,
- Układ dwóch pętli indukcyjnych oraz kwarcowy czujnik nacisku,
- Układ trzech pętli indukcyjnych,
- Pojedyncza pętla indukcyjna oraz 2 detektory osi,
- Pojedyncza pętla indukcyjna oraz 2 polimerowe czujniki nacisku,
- Pojedyncza pętla indukcyjna oraz 2 kwarcowe czujniki nacisku.
- T – czas pojawienia się pojazdu w strefie pomiarów,
- V – prędkość pojazdu,
- L – długość pojazdu,
- Naxle – liczba osi,
- Laxle – odległości między osiami,
- Trailer – obecność przyczepy,
- Axle load – naciski poszczególnych osi,
- Total mass – masa całkowita pojazdu,
- Cl. magnet – klasa pojazdu na podstawie jego profilu magnetycznego,
- Cl. ALT – klasa pojazdu na podstawie liczby i odległości między osiami (możliwe są różne schematy klasyfikacji np. schemat FHWA F lub autorska ALT), Ponadto system pozwala wyznaczyć następujące charakterystyki ruchu drogowego:
- k – gęstość ruchu,
- q – przepływ pojazdów,
- r – zajętość pasa ruchu,
- Vmean – średnia prędkość,
- Dt – odległości czasowe pomiędzy pojazdami.